|
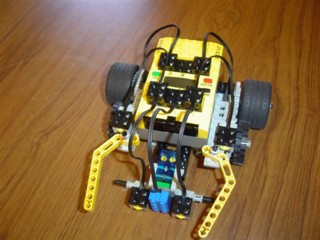
The materials I used for this project include the RCX, two motors, a light sensor, and four touch sensors. I also used Lego parts to build the body, wheels, and claws of the robot. There is also the laptop I used so that I could type the program into NQC, as well as the IR tower used to download the program to the robot. When the robot is running, I will have a black ring made of tape so the robot can sense its boundaries. I also have different types of objects for the robot to touch and push away.

|
| This is a picture of the RCX of a robot with two motors, a light sensor, and two touch sensors. |
|
| This is a picture of the robot I built for my project. |
|